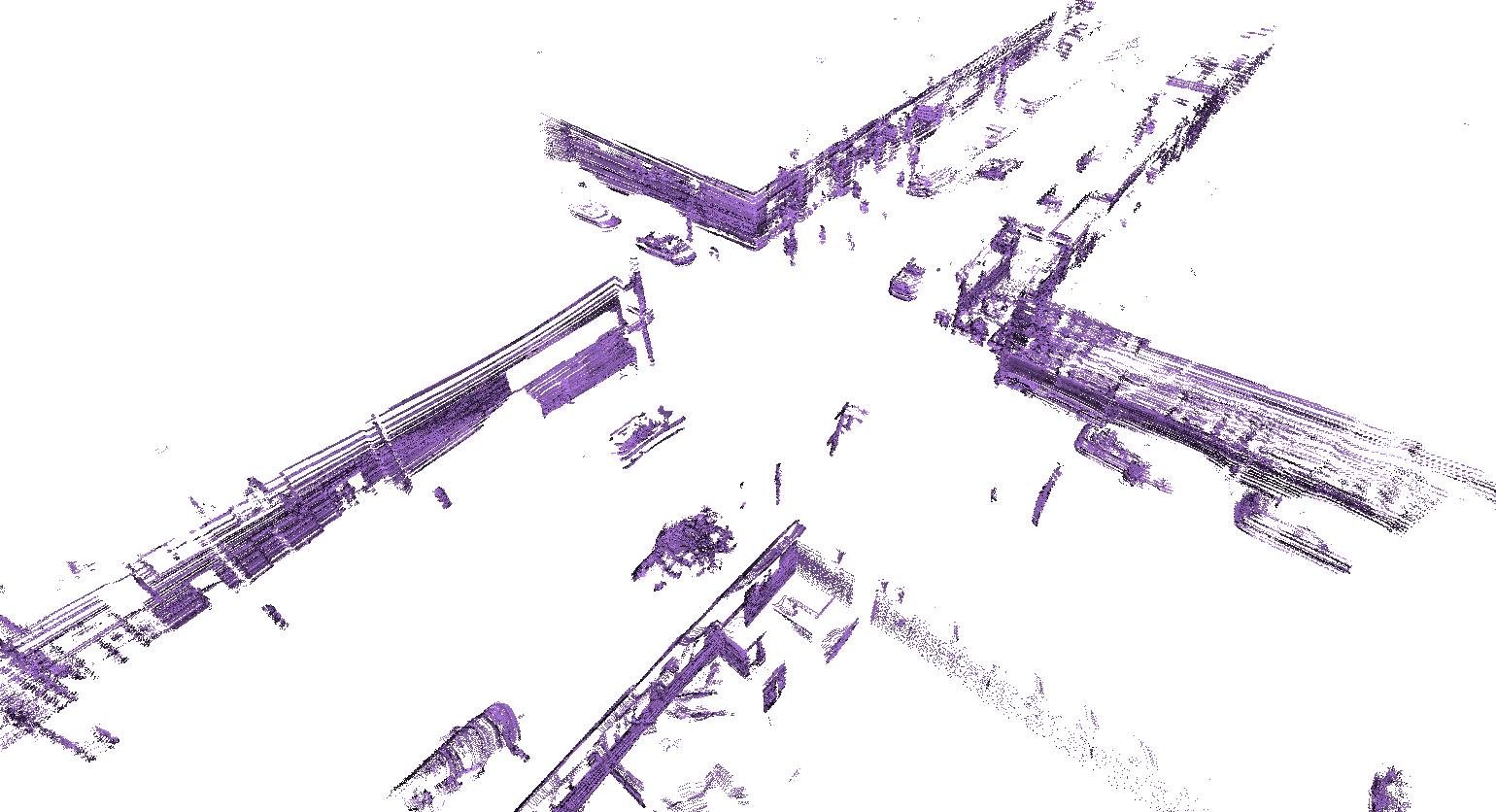
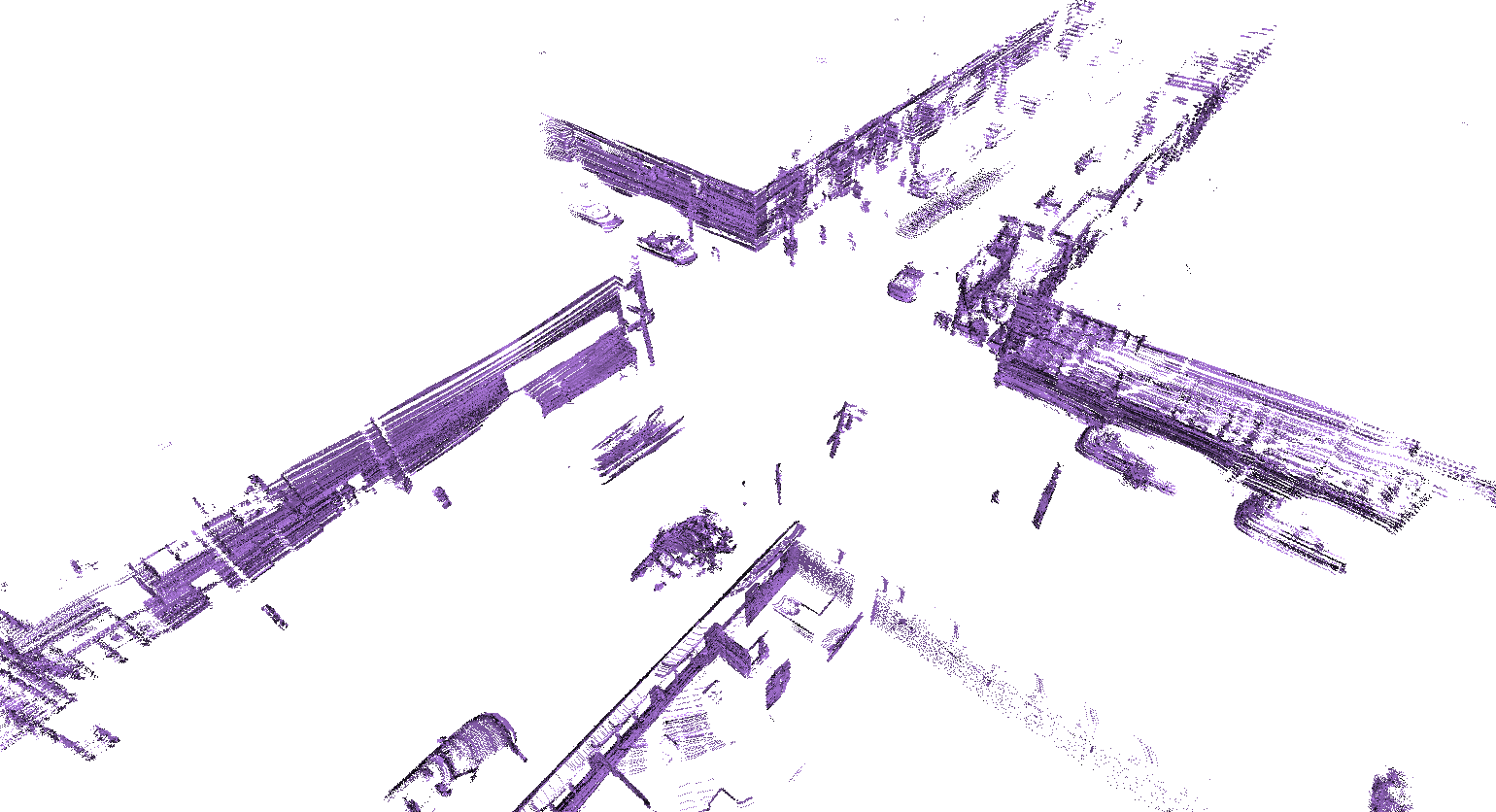
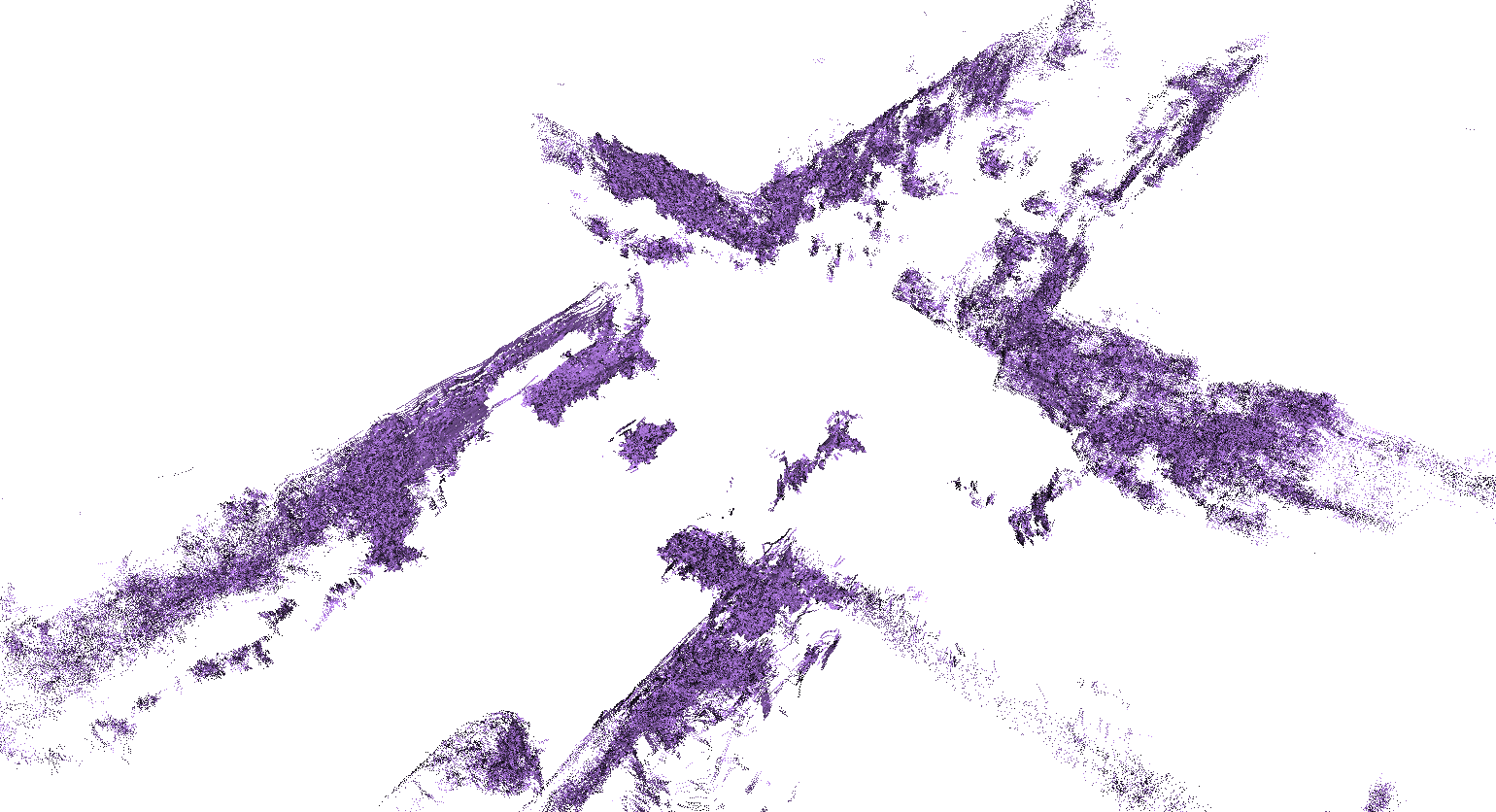
Visual results for trajectory estimation on Argoverse dataset
We provide more video results for trajecoty estimation on the Argoverse dataset.
As mentioned in the main paper, we used a sequence of 25 lidar frames sampled at 10 Hz,
and estimated the dense trajectory for each point.
The following videos show the estimated trajectories at each frame.
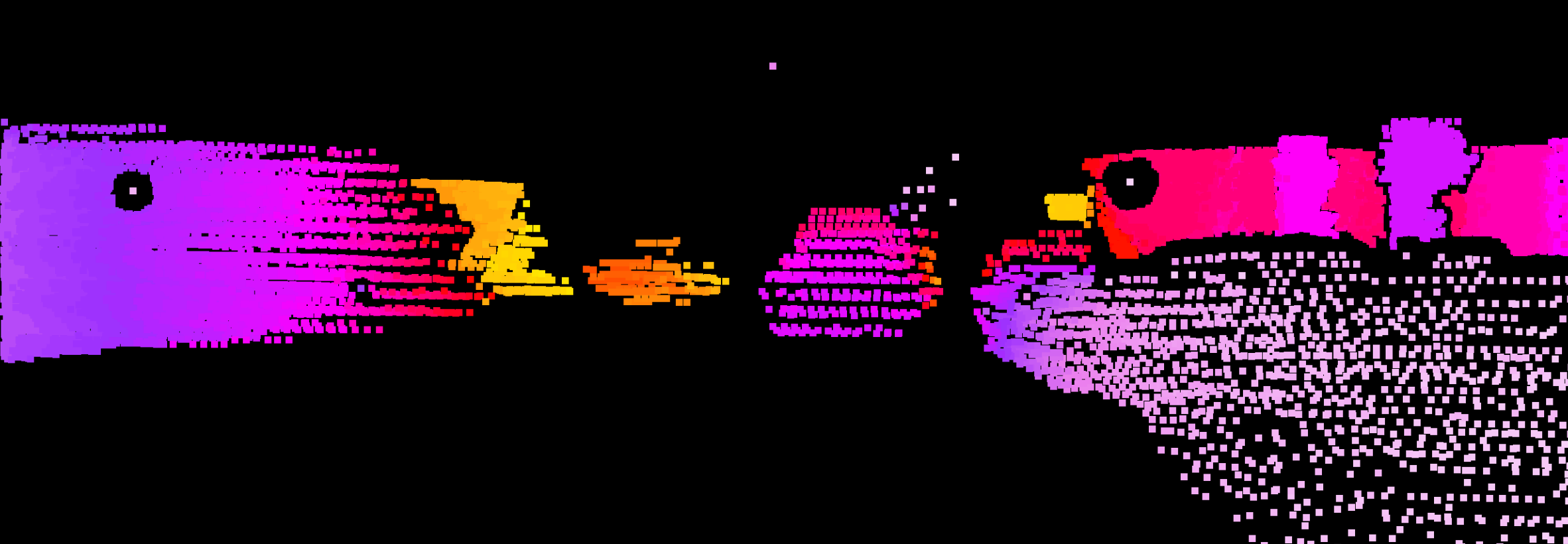
Our method directly ouputs the full trajectories, while NSFP [1]
used forward Euler integration,
and FlowStep3D [2] used K-nearest neighbor integration.
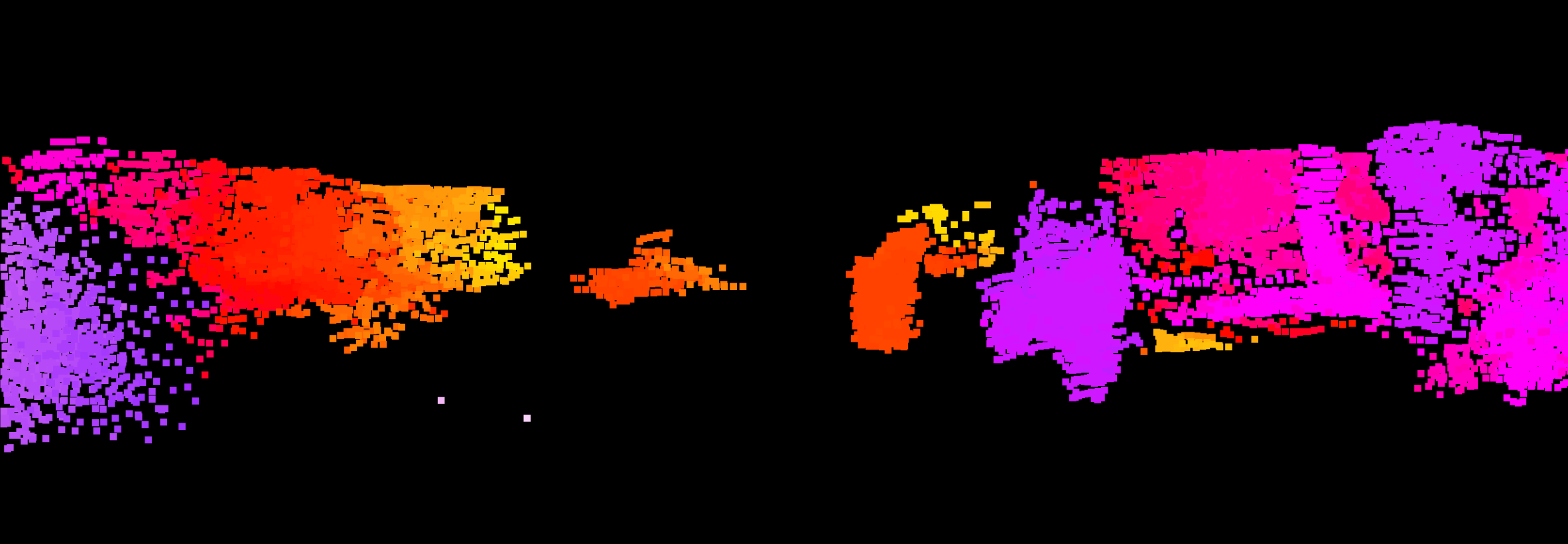
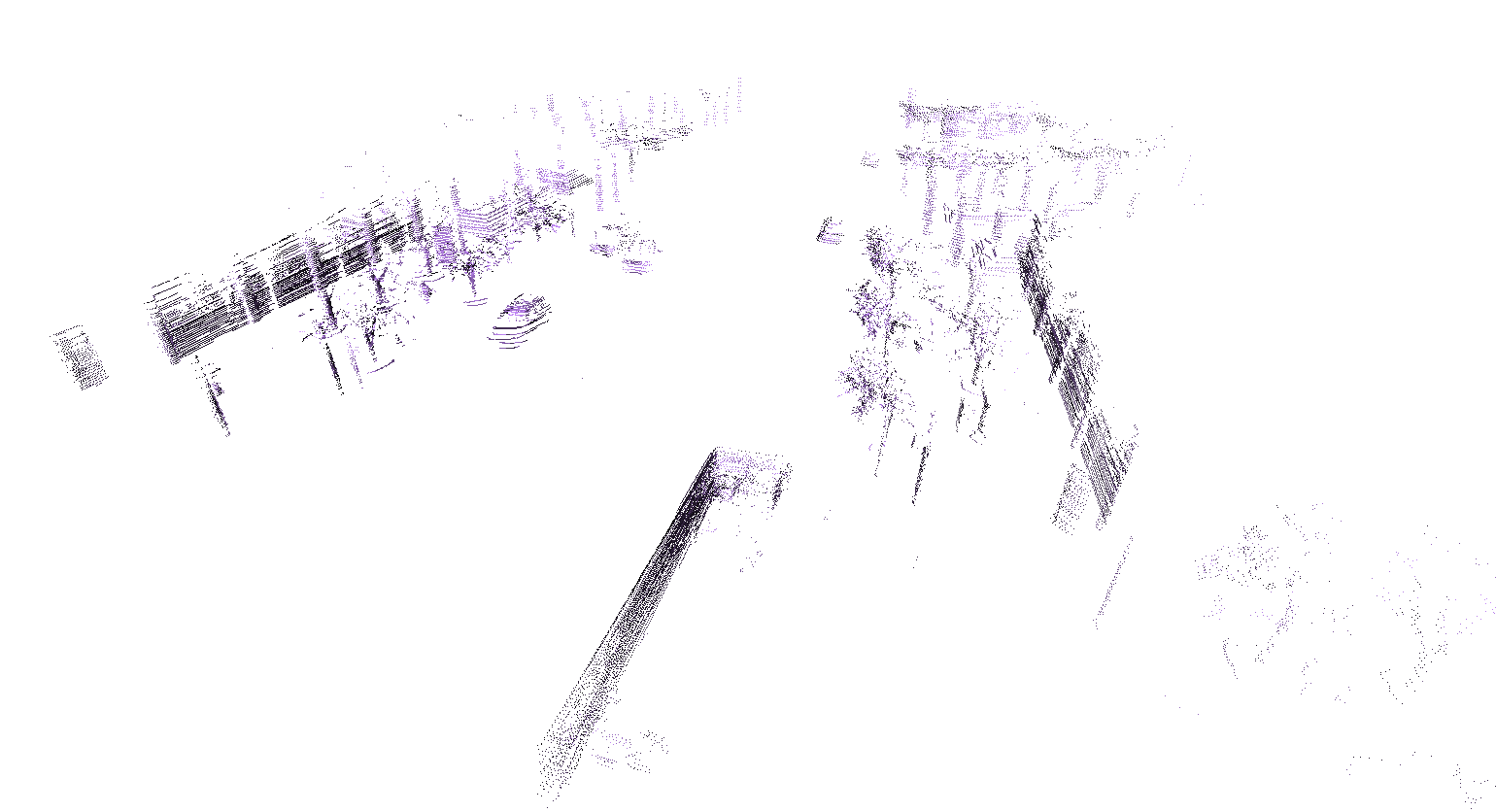
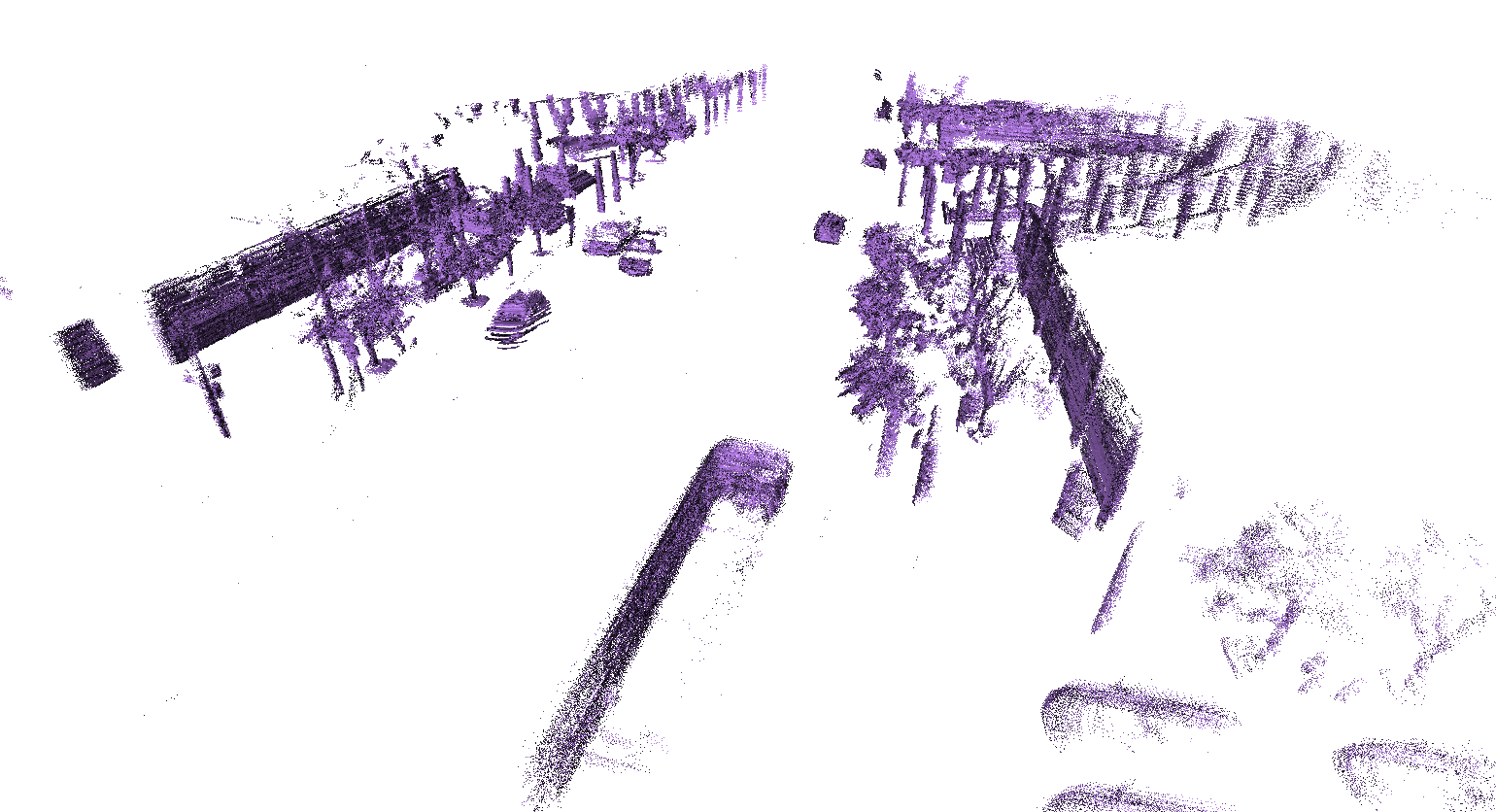
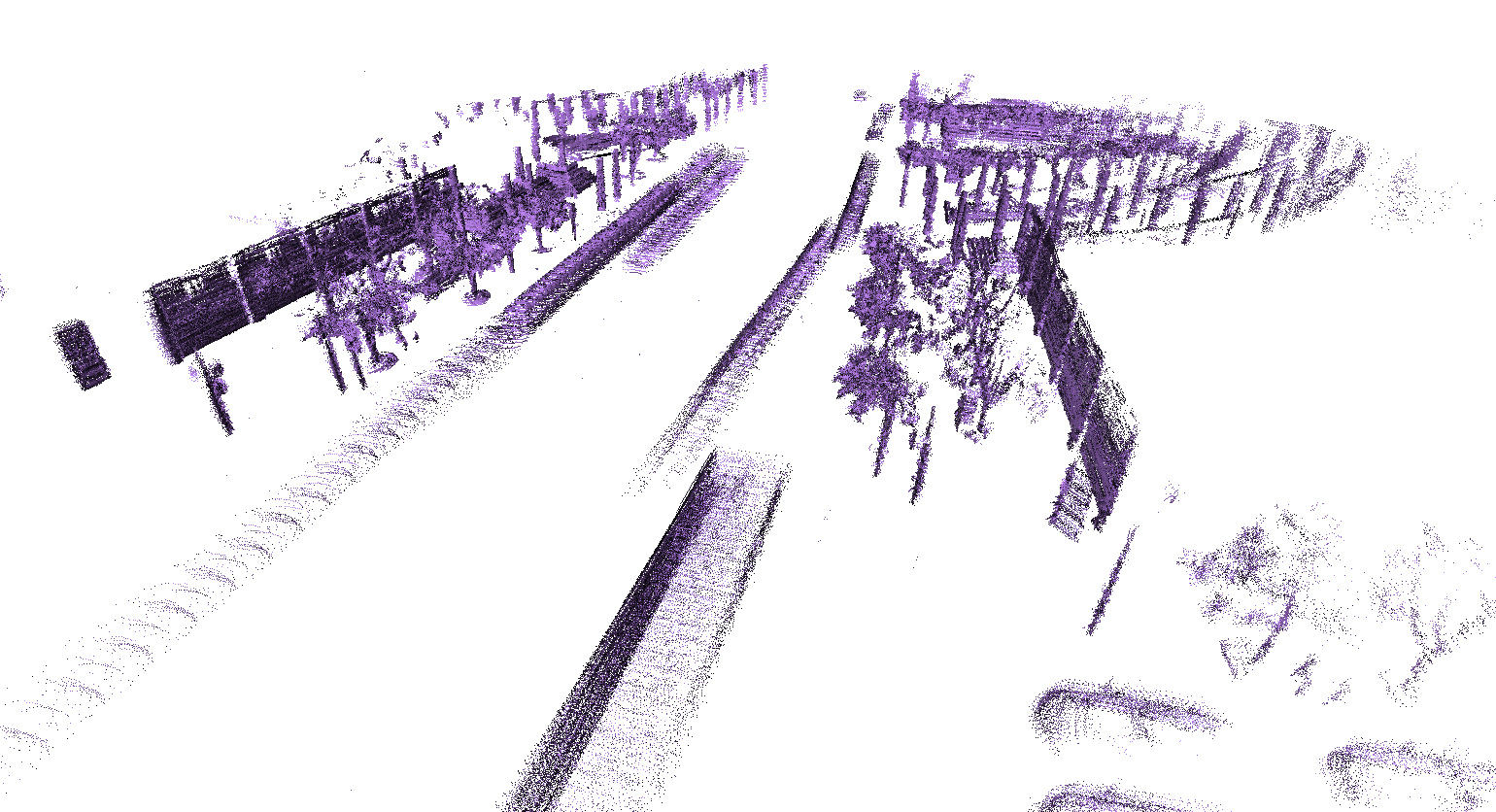
Colored points represent the point cloud, and the gradient gray lines denote the estimated trajecory.
The light gray lines are trajectories in older frames, and the darker gray lines indicate the most recent motions.